Designed For Running
Carnivore & Ungulate Locomotion
About Running (Cursorial Locomotion):
Typically the goal of running is speed, which is essential either to escape predation or to catch prey. Speed is the combined result of stride length and stride rate. Stride length is gained by increasing limb reach (anatomically or physiologically). Stride rate is favored by reducing limb mass (especially distal mass). Thus, stride rate and limb reach are naturally antagonistic, i.e., enhancing one generally compromises the other (shorter limbs move more quickly, longer limbs more slowly).
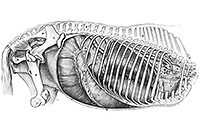
Ungulate herbivores have relatively long limbs that are devoted entirely to locomotion (ungulate animals have hooves). Because a roughage diet and bulky abdominal viscera limit trunk flexibility, stride length is obtained by limb elongation in ungulates. Stride rate is increased, anatomically, by reducing mass at the distal limb and, physiologically, by flexing distal joints during limb forward protraction.
Carnivores have relatively short, multipurpose limbs, used for both locomotion & apprehending prey. Carnivores gain speed by exploiting trunk flexibility to extend limb reach and thus stride length. Trunk flexibility is enabled by the small volume of viscera associated with a meat diet, which is why multipurpose limbs are required in the first place.
Because trunk flexion/extension requires massive abdominal/epaxial muscular effort, carnivores are short distance sprinters. In contrast, ungulates are designed for distance running. Equine limbs are particularly specialized for distance locomotion, relying relatively more on passive bone/ligament linkage and less on active nerve/muscle interaction (see details below.)
Quadruped vs Primate Locomotion:
While cursorial quadrupeds employ all four limbs for running, primates were adapted for arboreal locomotion, i.e., climbing and swinging through trees. Their limbs are designed for grasping and dexterity, which demands limb flexibility. Limbs have evolved to favor either flexibility (multi-purpose) or stability (single purpose). For example, design differences between primate and quadruped thoracic limbs include:
Primate anatomical features:
- trunk, compressed dorsoventrally
- scapula, fixed position located dorsally at the back of the thorax
- shoulder joint, fixed & capable of circumduction (ball & socket joint)
- two fully-developed bones in the forearm to facilitate rotation
- ulna, firmly attached to elbow, loosely to wrist
- radius, firmly attached to the wrist, loosely to elbow
- five digits, to facilitate manipulation dexterity
- palmigrade/plantigrade surface contact, favoring security over speed
- unguis, reduced to a scratching/digging tool (nail)

Quadruped features, to enhance stride length/rate:
- trunk, flattened mediolaterally
- scapula, positioned laterally and mobile to augment stride length
- shoulder joint, effectively a hinge joint (muscles serve as ligaments)
- brachium, short & highly muscular (keeping limb mass proximal)
- radius, becomes dominant in the antebrachium (stability vs. rotation)
- fewer digits in the manus & pes (favoring stability vs. dexterity)
- distally, muscle tissue is converted to ligament (in ungulates)
- elongated metacarpus and phalanges (extends limb length)
- digitigrade (carnivore) or unguligrade (hoof) ground contact
Forelimb vs Hind Limb Specialization:
Cursorial quadrupeds employ all four limbs for locomotion, but forelimbs and hind limbs are designed for different roles:
Forelimbs (thoracic limbs) carry 60% of static body weight. They are designed to absorb ground impact as the body is thrown forward by the pelvic limbs. Forelimbs improve gait efficiency by converting the kinetic energy of downward movement into the potential energy of stretched muscles & ligaments, which rebound to generate upward movement. Anatomically, the forelimb is:
- shorter and straighter than the pelvic limb
- connected to the trunk only by muscle and ligament (not bone articulation)

Hind Limbs (pelvic limbs) are the "motors" of locomotion, designed to propel the trunk forward including up/over obstacles during jumps. Anatomically, the hind limb is:
- longer and more angular than the forelimb
- joined to the trunk (axial skeleton) through a sacroiliac joint
Digitigrade & Unguligrade vs Plantigrade:
Reducing the region of ground contact while elevating & lengthening non-contact regions of the manus/pes is an effective means of elongating the distal limb. Instead of the entire plantar/palmar surface impacting the ground (plantigrade), only the toes make contact (digitigrade) or ultimately contact is reduced to the surface of a hoof (unguligrade).
The entire plantar surface of the pes makes ground contact in the case of leisurely gaits of people and bears. Such a plantigrade mode of locomotion favors secure ground contact at the cost of reduced limb length.
Carnivores make digitigrade ground contact with typically four digital pads (plus a metacarpal/metatarsal pad). The metacarpus/metatarsus is elevated and thus it adds to limb length.
In ungulate mammals, there is a reduction of digits and the unguis expands to form a hoof for unguligrade locomotion. The equine is the ultimate unguligrade: each limb has but a single digit. Body weight is transmitted to the distal phalanx and then transfered to the surrounding hoof wall. Only the hoof surface typically makes ground contact.
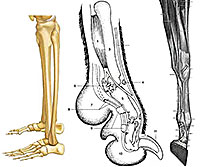
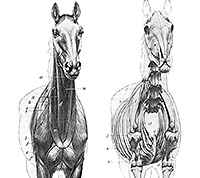
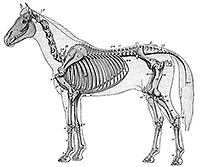
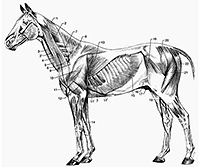
Equine, the ultimate ungulate runner:
The equine represents the ultimate example of evolutionary specialization for running. Anatomical modifications that favor prolonged standing and speed are keys to successful equine evolution. The equine limb features a single elongated digit including a distal phalanx that is surrounded by hoof. Relative to other species, equine limbs rely more on passive bone/ligament connections and less on active nerve/muscle interactions.
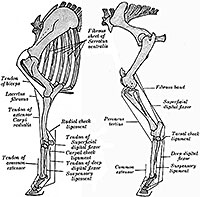
Forelimb specializations: The fetlock (metacarpal-phalangeal) joint, which translates downward when weight passes over it, is supported by three tendons. Superficial & deep digital flexor tendons both feature check ligaments that connect tendons directly to bone (isolating muscle bellies from being stretched). The single interosseous muscle is replaced entirely by tendon, becoming the so-called suspensory ligament. These three ligaments are stretched by body weight and rebound to lift the fetlock as weight moves off the limb.
Prolonged standing is facilitated by two additional features: The biceps brachii tendon, lacertus fibrosus fascia and extensor carpi radialis tendon combine to form a continuous fibrous cord from the carpus to the shoulder joint. The cord prevents body weight from collapsing the shoulder joint when body weight anchors the manus in place. Finally, fibrous bands (dorsoscapular ligament) between thoracolumbar deep fascia and the scapula assist the serratus ventralis muscle in supporting the trunk.
Hind limb specializations: Cranially the fibularis (peroneus) tertius tendon and caudally the superficial digital flexor tendon constitute two fibrous cords that mechanically link stifle and hock joints. The fibrous cords (reciprocal apparatus) keep the two joints synchronized even during conditions of neuromuscular fatigue. To facilitate standing, the stifle joint can be locked to preclude its collapse under body weight (by hooking a loop of patellar tendons around an enlarged medial ridge of the femoral trochlea). This locking mechanism allows a horse to rest one hind limb at a time.
Gallop Gaits (Equine vs Carnivore):
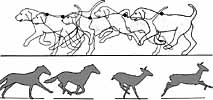
A quadruped gait (walk, trot, pace, canter, gallop) refers to a characteristic pattern of ground contact made by all four limbs during one stride. The fastest gait is the gallop. It is a four beat gait in which no more that one limb makes ground contact at a time
Transverse Gallop: The four beats are: left hind, right hind, left fore, right fore, followed by suspension prior to the next left hind beat. This pattern is a right lead, which quadrupeds favor when circling to the right. The alternative is a left lead (the lead is indicated by the last forelimb that contacts the ground prior the suspension). Quadrupeds can switch leads within a stride.
Both carnivores and ungulates employ the transverse gallop (readily recognizable since the hind limb two beat pattern is repeated by the forelimbs prior to suspension).
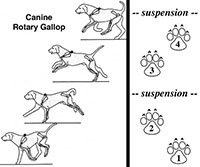
Rotary Gallop: Carnivores also employ a rotary gallop, which is their fastest but most tiring gait due to the extent of epaxial and abdominal muscle invovolvement. It features two suspension phases per stride, e.g., left hind, right hind, suspension, right fore, left fore, followed by another suspension prior to the next left hind. (This would be a left lead, the alternative is a right lead.) In the rotary gallop limb contact rotates circularly among the four limbs.
Carnivore vs. Herbivore Digestive Tracts:
Different diets among domestic mammals have associated anatomical, physiological, and behavioral implications. Locomotor anatomy and physiology are linked to diet because the abdominal digestive tract impacts locomotion, as was mentioned above. Features of three types of digestive tracts include:
Canine digestive tract
- simple glandular stomach
- small cecum and simple colon
- small abdominal volume especially when fasted
- high protein diet reduces feeding frequency

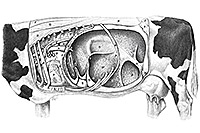
Ruminant digestive tract (cattle, sheep, goat, deer, etc.)
- huge stomach with four compartments, including three fermentation chambers
- large cecum and coiled ascending colon
- large abdominal volume even when fasted
- digestion of rumen flora provides a dietary protein supplement
- periodic grazing and subsequent cud mastication safe from predators
Equine digestive tract
- roughage must be chewed to pass through a simple stomach
- huge cecum and ascending colon needed for hind gut fermentation
- large abdominal volume even when fasted
- roughage diet requires grain or coprophagy as a protein supplement
- prolonged grazing & mastication while exposed to predators in the wild